Animal Tracking
THIS PROJECT PAGE IS STILL UNDER CONSTRUCTION![]()

THIS PROJECT PAGE IS STILL UNDER CONSTRUCTION![]()
THIS PROJECT PAGE IS STILL UNDER CONSTRUCTION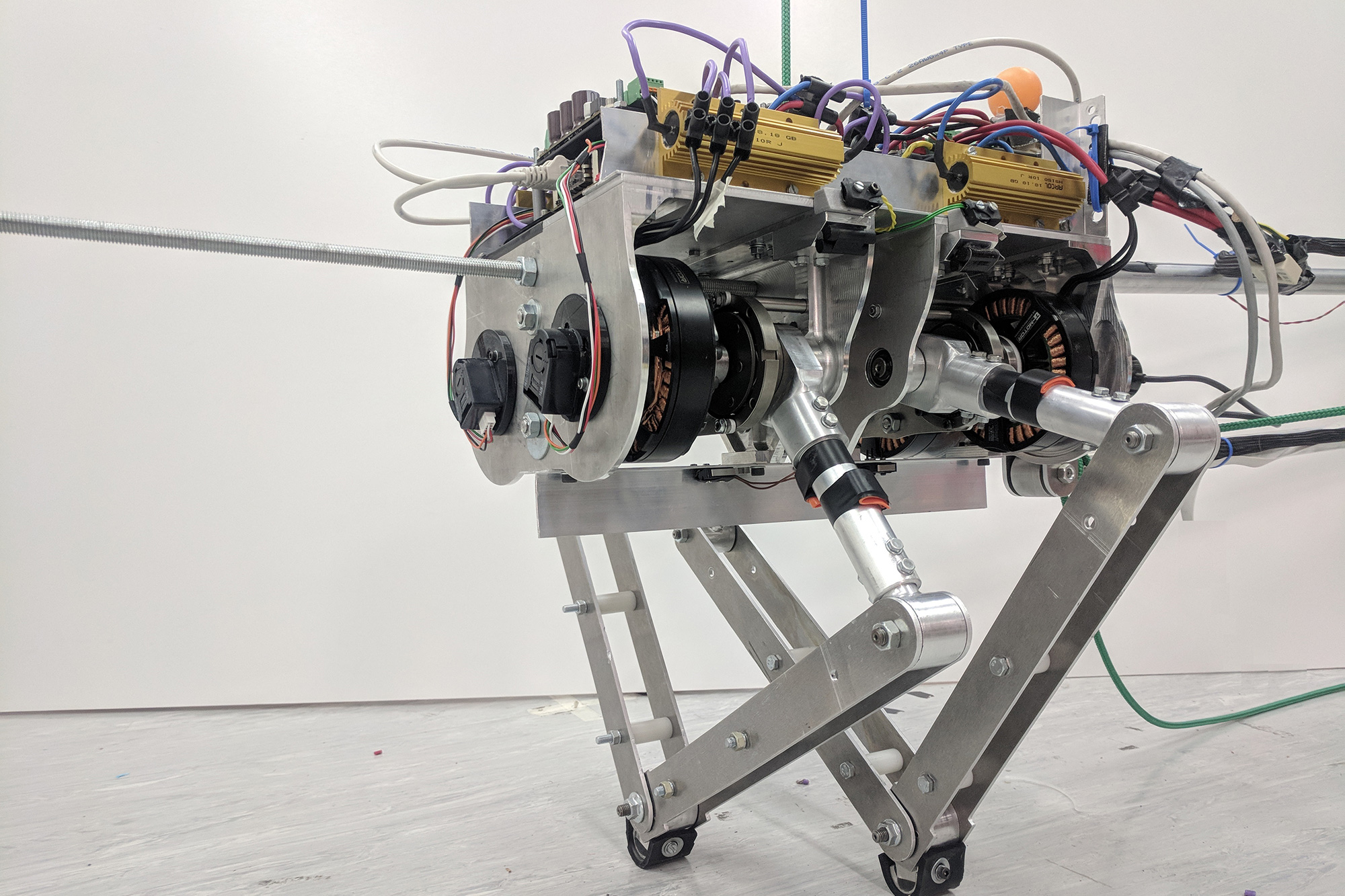
THIS PROJECT PAGE IS STILL UNDER CONSTRUCTION
THIS PROJECT PAGE IS STILL UNDER CONSTRUCTION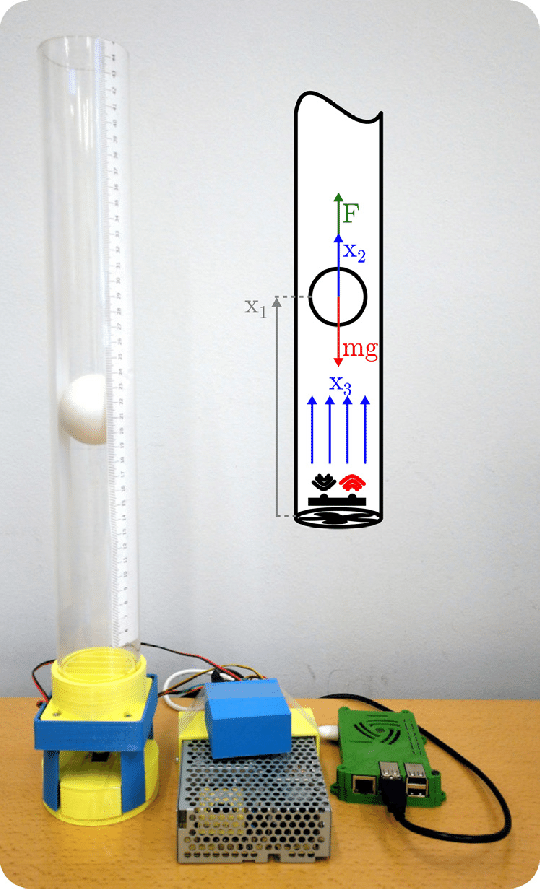
THIS PROJECT PAGE IS STILL UNDER CONSTRUCTION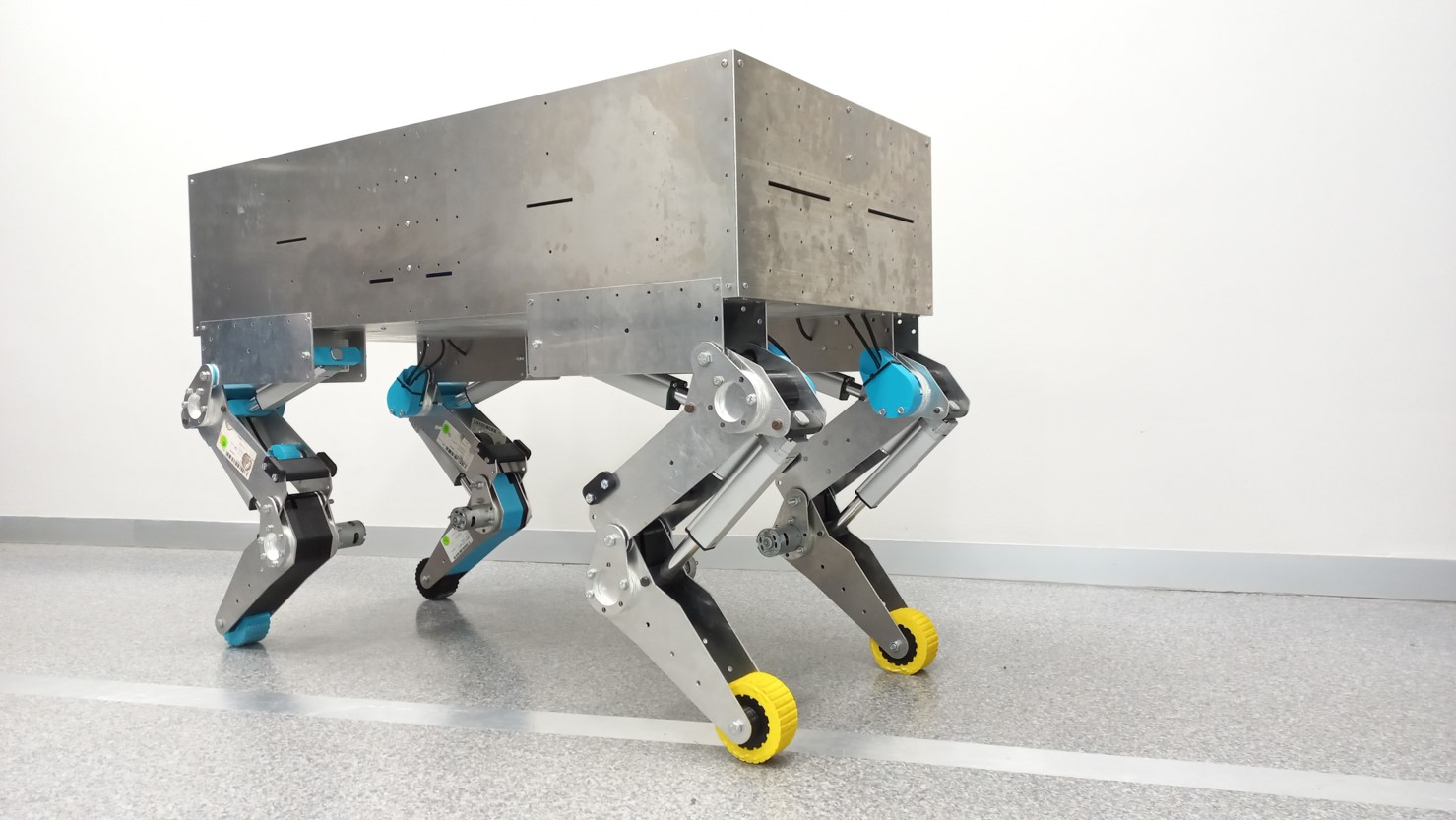
THIS PROJECT PAGE IS STILL UNDER CONSTRUCTION
THIS PROJECT PAGE IS STILL UNDER CONSTRUCTION
THIS PROJECT PAGE IS STILL UNDER CONSTRUCTION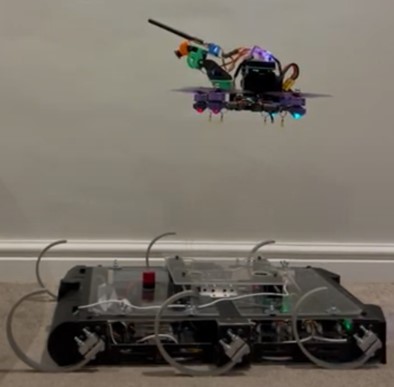
THIS PROJECT PAGE IS STILL UNDER CONSTRUCTION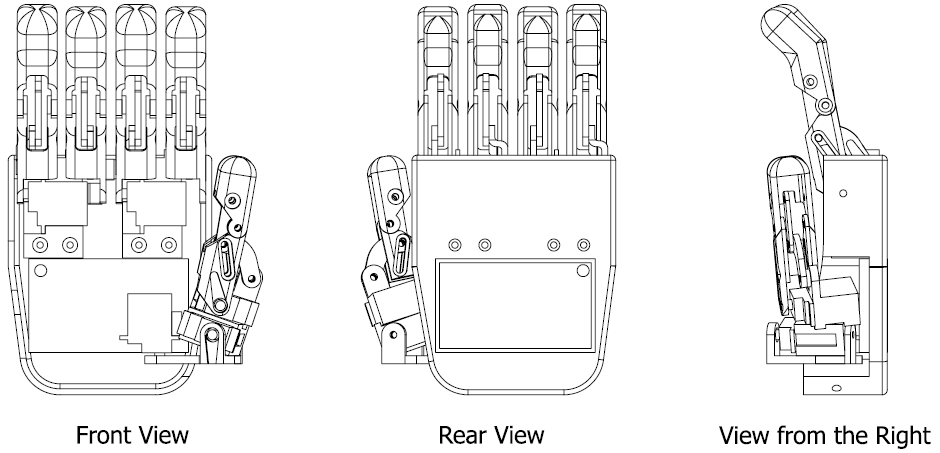
Published in International Federation of Automatic Control (IFAC), 2014
Inspired by the acrobatics of the lizard, we present a novel robot platform capable of performing a barrel roll from a ramp. The system is modeled using Euler-Lagrange mechanics, followed by controller design and numerical simulation. A robotic platform is then designed to perform the experiments. Finally, we show that purely by the use of the actuated tail, the robot can rapidly performing a 360 degree roll rotation in under a second.
Recommended citation: Fisher, C., and A. Patel. "Preparation of papers for ifac conferences & symposia: Flipbot: A lizard inspired stunt robot." IFAC Proceedings Volumes 47.3 (2014): 4837-4842. https://www.sciencedirect.com/science/article/pii/S1474667016423633
Published in International Conference on Intelligent Robots and Systems (IROS), 2015
This paper presents a novel approach to achieving aerial pitch righting in a mobile robot, inspired by the draglines used by jumping spiders. We developed and simulated a mathematical model of the spider during the aerial phase of its jump to gain further insight into the factors affecting the pitch response. The results demonstrate that the dragline could also potentially function as a brake, slowing the spider down before landing. Subsequently, we developed a small robotic platform to demonstrate dragline-based aerial pitch righting on a robot experimentally. Lastly, the possible size and weight advantages over other pitch righting methods are discussed.
Recommended citation: S. Shield, C. Fisher and A. Patel, "A spider-inspired dragline enables aerial pitch righting in a mobile robot," 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hamburg, Germany, 2015, pp. 319-324, doi: 10.1109/IROS.2015.7353392. https://ieeexplore.ieee.org/abstract/document/7353392
Published in Biology Open, 2016
During high-speed pursuit of prey, the cheetah (Acinonyx jubatus) has been observed to swing its tail while manoeuvring (e.g. turning or braking) but the effect of these complex motions is not well understood. This study demonstrates the potential of the cheetahs long, furry tail to impart torques and forces on the body as a result of aerodynamic effects, in addition to the well-known inertial effects. The first-order aerodynamic forces on the tail are quantified through wind tunnel testing and it is observed that the fur nearly doubles the effective frontal area of the tail without much mass penalty. Simple dynamic models provide insight into manoeuvrability via simulation of pitch, roll and yaw tail motion primitives. The inertial and quasi-steady state aerodynamic effects of tail actuation are quantified and compared by calculating the angular impulse imparted onto the cheetahs body and its shown aerodynamic effects contribute to the tails angular impulse, especially at the highest forward velocities.
Recommended citation: Patel, A., Boje, E., Fisher, C., Louis, L. and Lane, E., 2016. Quasi-steady state aerodynamics of the cheetah tail. Biology open, 5(8), pp.1072-1076. https://journals.biologists.com/bio/article/5/8/1072/1728/Quasi-steady-state-aerodynamics-of-the-cheetah
Published in IEEE Sensors Letters, 2017
The cheetah (Acinonyx Jubatus) is the fastest terrestrial animal and is also highly maneuverable. An investigation into the whole-body motion dynamics of this specialized predator will illuminate various factors that influence and affect performance in legged animals as well as provide insight for the design of future bio-inspired robots. Presently, animal sensor collars can capture the gross animal behavior successfully but do not provide information about the animals complete motion. Here, in an effort towards whole-body motion estimation, we demonstrate the use of animal mounted cameras, as well as the sensor suite of a smartphone that are attached to captive cheetahs during maneuvers. The various sensors are fused by an Extended Kalman Smoother (EKS) to provide high-bandwidth state estimates of the position, velocity, and acceleration of the cheetah spine and tail.
Recommended citation: A. Patel, B. Stocks, C. Fisher, F. Nicolls and E. Boje, "Tracking the Cheetah Tail Using Animal-Borne Cameras, GPS, and an IMU," in IEEE Sensors Letters, vol. 1, no. 4, pp. 1-4, Aug. 2017, Art no. 6000504, doi: 10.1109/LSENS.2017.2716618. https://ieeexplore.ieee.org/document/7950913
Published in International Conference on Intelligent Robots and Systems (IROS), 2017
An actuated spine appears to be a critical component for maneuverability in quadruped animals. However, robotic systems have yet to capitalize on this mechanism. This research compares three different spine morphologies in the planar case, namely the rigid, revolute and prismatic spine. Using a wide range of robots sampled from the design space (200 robots sampled at random), large-scale trajectory optimization (60 seed points per robot per spine morphology) was used to determine the best spine morphology in terms of stride averaged acceleration. Bootstrapping was performed on the results to achieve a better statistical representation and this revealed that for 75% of the robots, a prismatic spine design is the most effective at rapid acceleration, followed by the revolute spine at 6% and rigid spine at 18%.
Recommended citation: C. Fisher, S. Shield and A. Patel, "The effect of spine morphology on rapid acceleration in quadruped robots," 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 2017, pp. 2121-2127, doi: 10.1109/IROS.2017.8206028. https://ieeexplore.ieee.org/document/8206028
Published in IEEE Robotics and Automation Letters, 2019
Transient locomotion is still poorly understood in terms of planning and implementation on robotic platforms, with most research concentrated on steady-state motion. In this letter, we investigate optimal rapid acceleration (positive and negative) maneuvers of a planar numerical quadruped and biped robot. The question we ask is whether legged robots should transition through discrete, intermediate gaits (walking to trot to bound) or plan a direct transition to the top-speed gait. We present numerical evidence supporting the energetic optimality of transitioning to a desired gait without intermediate gait transitions. Trajectories were generated from rest to steady state and vice versa. Two cost functions (cost of transport and a heat-based cost function) were analyzed and compared to observations made in nature. A full 30-m trajectory was generated and compared to the acceleration and deceleration results, which further supported transitioning directly to the desired gait. All the trajectories were observed to follow a sliding mass template model which, in future, can be used as a heuristic to plan these transient maneuvers.
Recommended citation: C. Fisher, C. Hubicki and A. Patel, "Do Intermediate Gaits Matter When Rapidly Accelerating?," in IEEE Robotics and Automation Letters, vol. 4, no. 4, pp. 3418-3424, Oct. 2019, doi: 10.1109/LRA.2019.2927952. https://ieeexplore.ieee.org/document/8758791
Published in International Conference on Intelligent Robots and Systems (IROS), 2019
The natural world hosts a few mammals that display both a high degree of agility and speed. However these animals have complex leg morphologies. Robot designers are thus faced with the dilemma of which morphology to employ when designing the next generation of agile legged robots. Thus this letter presents a novel investigation into the effects of limb morphology of quadrupeds during rapid transient maneuvers such as acceleration and deceleration. Three leg configurations inspired by nature (O-, X-Type and All-Ankle) as well as All-Knee configurations are compared. Extensive large scale Monte Carlo simulations utilizing contact-implicit trajectory optimization methods were employed on 100 randomly generated robots of varying sizes to determine the optimal configuration for the task of rapid transient locomotion. After extensive analysis, the investigation revealed that an X-Type leg configuration outperformed all other configurations. Ultimately, these results will provide insight for the mechanical design of future agile quadruped robots.
Recommended citation: L. Raw, C. Fisher and A. Patel, "Effects of Limb Morphology on Transient Locomotion in Quadruped Robots," 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 2019, pp. 3349-3356, doi: 10.1109/IROS40897.2019.8968206. https://ieeexplore.ieee.org/document/8968206
Published in Frontiers in Mechanical Engineering, 2020
In nature animals are highly adapted to perform rapid maneuvers. However, these maneuvers have generally been avoided by robotics researchers due to the complex (and poorly-understood) dynamics they entail. To improve the agility of the current state-of-the-art robots, highly agile platforms need to be developed capable of performing these maneuvers. Due to the complexities involved, robotics researchers need to leverage trajectory optimization techniques to inspire and aid in designing and controlling these platforms. Presented here is the optimization-inspired design and testing of an agile bipedal robot called Baleka, which has specifically been designed for rapid acceleration and gait termination. By using the Vertical Agility metric (VA), experimental results show that Baleka is one of the most agile biped robots. Baleka achieved a vertical agility of 1.86 m/s (for the biped) and 1.82 m/s (for the monopod). When leaping with a single leg, Baleka achieved a vertical agility of 1.33 m/s, surpassing that of humans (0.89 m/s). These results indicate the power of using trajectory optimization methods to aid in the mechanical design process and prove Balekas suitability for future rapid transient maneuver studies.
Recommended citation: Fisher, Callen, Alexander Blom, and Amir Patel. "Baleka: A bipedal robot for studying rapid maneuverability." Frontiers in Mechanical Engineering 6 (2020): 54. https://www.frontiersin.org/articles/10.3389/fmech.2020.00054/full
Published in SAIEE Africa Research Journal, 2021
Animals exploit spine actuation during rapid locomotion, however this has only recently become a focal point in robotics. Roboticists have used a multitude of spine configurations in their platforms but the optimal design for rapid acceleration and deceleration maneuvers is yet to be discovered. In this paper, we endeavour to find this optimal spine morphology by using large-scale Monte Carlo trajectory optimization simulations on long-time-horizon minimum time problems (start and end at rest while travelling a fixed distance of 30 spine lengths). Broad applicability of the results was ensured by generating 100 sets of robot parameters at random from a carefully selected design space, comparing the performance of the rigid, revolute and prismatic spine morphology. Using bootstrapping techniques, it was determined with a 78.8% probability that the prismatic spine morphology was the optimal spine for these long-time-horizon trajectories. These results will serve as a guide for designers of future, agile quadruped robots.
Recommended citation: C. Fisher and A. Patel, "On the optimal spine morphology of rapidly accelerating quadrupeds," in SAIEE Africa Research Journal, vol. 112, no. 3, pp. 126-133, Sept. 2021, doi: 10.23919/SAIEE.2021.9513626. https://ieeexplore.ieee.org/document/9513626
Published in International Conference on Robotics and Automation (ICRA), 2021
For robots to leave the safety of the laboratory and explore the world, maneuverability will need to be mastered. However, transient motions, such as rapid acceleration and deceleration, have received little attention in the literature. This is mainly due to the complexity of analyzing these high dimensional systems that have no closed-form solution which makes controller design a non-trivial task. One method is to utilize heuristic control inspired by animal locomotion (or intuition), but these may not be optimal for a given task. Here, we take the novel approach and leverage trajectory optimization methods to enable us to identify heuristic controllers for the task of transient locomotion. Specifically, we investigate acceleration to a steady-state gait as well as decelerating from a steady-state gait to rest. These identified heuristic controllers were then validated on a hybrid pneumatic-electric monopod robot. Our initial results indicate that a Raibert controller is in fact the energy optimal policy for transient maneuvers.
Recommended citation: C. Fisher, J. Van Zyl, R. Govender and A. Patel, "Optimization-Inspired Controller Design for Transient Legged Locomotion," 2021 IEEE International Conference on Robotics and Automation (ICRA), China, 2021, pp. 8345-8351, doi: 10.1109/ICRA48506.2021.9560759. https://ieeexplore.ieee.org/document/9560759
Published in IEEE Sensors Letters, 2021
After analyzing dynamic motions performed in nature, it is clear that animals adapt their footing in real time to compensate for disturbances such as slipping or stumbling, by relying on ground reaction force feedback. However, in robotics, this feedback is not commonly utilized due to the costs, as well as the size and mass of available ground reaction force sensors. The aim of this letter is to present a prototype of a novel ground reaction force sensor that makes use of low-cost load cells mounted at fixed angles to each other. The angle of the load cells was chosen to maximize crosstalk between the sensors while minimizing the overall size of the sensor. Due to the crosstalk, it drastically simplified the mechanical design of the sensor. Through the use of neural networks, two-axis ground reaction forces were estimated with a high accuracy of above 98.5%. Future research involves extending the concept to measure three-axis ground reaction forces in real time.
Recommended citation: J. S. Schulze and C. Fisher, "Prototype of an Ultralow-Cost 2-D Force Sensor for Robotic Applications," in IEEE Sensors Letters, vol. 5, no. 6, pp. 1-4, June 2021, Art no. 2500404, doi: 10.1109/LSENS.2021.3074064. https://ieeexplore.ieee.org/document/9408348
Published in International Conference on Robotics and Automation (ICRA), 2021
Modeling the Coulomb Friction Cone in trajectory optimization is typically done by linearizing it along a series of vectors. Often, these vectors define the edges of polyhedral estimations of the cone. This article provides an alternate approach that samples the cone along a vector that satisfies the Maximum Dissipation Principle, which is shown to be significantly more computationally tractable. The proposed technique uses the polar representation of the relative velocity of a contact point on a surface to determine the direction of the resultant friction force and linearizes the friction cone along this vector. This study describes the development of the proposed model. Thereafter, a trajectory optimization experiment was conducted to compare the traditional four-sided polyhedral estimation of the friction cone with the novel method. Compute time and computational complexity were used as performance metrics in this study. Results from these experiments indicate that the proposed method reduced the compute time by 39.13% and a 57.00% reduction in inequality constraints when compared to the 4-sided polyhedral estimation.
Recommended citation: D. Pretorius and C. Fisher, "A novel method for computing the 3D friction cone using complimentary constraints," 2021 IEEE International Conference on Robotics and Automation (ICRA), China, 2021, pp. 5000-5006, doi: 10.1109/ICRA48506.2021.9561800. https://ieeexplore.ieee.org/document/9561800
Published in SAIEE Africa Research Journal, 2022
To date there have been great advances in the legged robotics community. However, these platforms are extremely costly to develop and require complex controllers to perform agile motion, limiting their research to well funded institutions, or purely simulation based studies. This research focuses on an extremely low cost robotic monopod platform that consists of a high powered servo motor as well as a pneumatic actuator. Due to the on/off (bang bang) nature of pneumatics, the platform is challenging to mathematically model. Using a reduced order model of the pneumatic actuator, trajectory optimization methods were implemented to generate acceleration, steady-state and deceleration trajectories. These were then analyzed and a simple state machine controller was developed to implement these trajectories on the robotic platform, with comparisons to the simulation results. In order to test the capabilities of the monopod robot, the above method was further extended with the robot running on multiple different surfaces (hard surface as well as two different gravel surfaces). Results are promising and reveal that simple models and controllers are sufficient to generate stable transient motions for a legged robot running on non-uniform terrain.
Recommended citation: C. Fisher and J. Meyer, "Controlling a low cost bang bang pneumatic monopod," in SAIEE Africa Research Journal, vol. 113, no. 4, pp. 165-170, Dec. 2022, doi: 10.23919/SAIEE.2022.9945866. https://ieeexplore.ieee.org/document/9945866
Published in SAIEE Africa Research Journal, 2023
Thumb loss can diminish ones hands functionality by up to 40% and the loss of ones entire hand can severely impact a persons ability to perform simple day-to-day tasks. Therefore, there exists a need to focus on the development of a thumb mechanism which supports dexterous grasping activities in anthropomorphic robotic hands. This paper documents the design process of a novel robotic hand, and shows experimental results validating its overall performance. A large focus was placed on developing a novel thumb mechanism which could replicate the thumbs characteristic movement types, namely flexion-extension, abduction-adduction, and oppositionreposition. Additional focus was placed on developing a mechanism for flexion-extension movement of the fingers which did not incorporate passive components and on producing a fully self-contained prototype — with the electronics and actuators contained inside the palm, and the power supply inset against the back of the palm. The hand successfully followed motion commands from a sensor glove, and was able to replicate 14 grasp configurations which demonstrated its dexterous grasping abilities.
Recommended citation: S. Woods and C. Fisher, "Development of a self-contained robotic hand with dexterous grasping capabilities for research applications," in SAIEE Africa Research Journal, vol. 114, no. 3, pp. 87-92, Sept. 2023, doi: 10.23919/SAIEE.2023.10214228. https://ieeexplore.ieee.org/document/10214228
Published in RAPDASA-RobMech-PRASA-AMI, 2023
Gait generation for a legged robot in real-time is no simple task. Typically, powerful processors are required to perform real-time trajectory optimisation techniques to generate the trajectories, or the platform requires full state feedback and controllers to track a pre-generated trajectory. Here we present a novel method for generating gaits in real-time by varying three parameters (RideHeight, StepLength, and StepHeight). Various successful walking experiments were performed with the developed quadrupedal platform, demonstrating that this method worked with minimal state feedback (only leg angles) and limited processing power (Teensy 4.0 microcontroller was used). The resulting gait was generated in real-time and maintained stability in open loop. The platform was capable of traversing obstacles (50mm x 50mm) and ascending or descending slopes (15 degrees).
Recommended citation: PENDING https://www.matec-conferences.org/articles/matecconf/abs/2023/15/matecconf_rapdasa2023_04022/matecconf_rapdasa2023_04022.html
Published in RAPDASA-RobMech-PRASA-AMI, 2023
This study presents a novel approach to the design of cost-effective autonomous rovers using a heterogeneous computing architecture. The research focuses on the development and evaluation of an autonomous rover system, priced under $2 700 (USD), that can operate independently in various environments. The systems performance was assessed in real-world conditions, demonstrating an average speed of 0.5 m/s, an energy consumption of 0.2 kWh, and a decision-making error rate below 5%. The results suggest that the use of heterogeneous computing architectures can lead to the development of affordable and efficient autonomous navigation systems. The paper concludes by discussing potential future research directions and the broader implications of these findings for the field of autonomous systems.
Recommended citation: PENDING https://www.matec-conferences.org/articles/matecconf/abs/2023/15/matecconf_rapdasa2023_04008/matecconf_rapdasa2023_04008.html
Published in SAIEE Africa Research Journal, 2023
Humans and animals leverage agility to negotiate the unpredictable environments we occupy. In order for legged robots to leave sterile lab environments, they need to be agile enough to negotiate our lives. Currently, human agility is far superior to the state-of-the-art robotic platforms. Replicating this on robotic platforms require a profound understanding of how contact events are leveraged to complete agile tasks. In line with this aim, this letter was an initial investigation into bipedal turning, to gain insight into how turning was achieved, and to identify any kinematic trends that emerged from the optimization results. This research was conducted on a simulated 10 DoF non-planar bipedal platform with point feet, and made use of a realistic friction cone, and not a linearized approximation. The mathematical model used was based on the bipedal robot currently under development. Two experiments were conducted: rapid turns with a fixed turn angle at varying speeds, and rapid turns with varying turn angles at a fixed speed. Results indicated that slip occurred 93.32% of the contact duration, and turn overshoot was present in all trajectories analyzed. Additionally, a long-time-horizon trajectory was presented to motivate the feasibility and stability of the turn trajectories studied.
Recommended citation: C. Fisher, D. Pretorius and N. Weiss, "Initial investigation into bipedal turning: A trajectory optimization study," in SAIEE Africa Research Journal, vol. 114, no. 3, pp. 80-86, Sept. 2023, doi: 10.23919/SAIEE.2023.10214227. https://ieeexplore.ieee.org/document/10214227
Published in IEEE Sensors Journal, 2023
Surface electromyography (sEMG) has been the subject of investigation for the control of myoelectric prosthesis since the 1960s. Ongoing research seeks to improve existing systems as the complexity of the human hand and the challenge of obtaining meaningful control signals from the human body have created ample opportunities for further exploration. In the past, little focus has been placed on minimizing the number of sEMG channels required for pattern recognition of individual finger movements, as well as data preparation techniques used to optimize classification for such systems. The objective of this article is to describe the process required to obtain real-time sEMG classification while optimizing the number of individual finger movements made, as well as minimizing the number of sEMG channels required. Necessary data preparation and collection methods to optimize the system are also detailed. The resultant system classified four movements at an average accuracy of 72.2% in real-time, and made use of a multilayer perceptron (MLP) to achieve this. Due to the constraints imposed by the ethical clearance granted by the Research Ethics Committee (REC) of Stellenbosch University, the development of this system relied solely on data obtained from a single subject.
Recommended citation: L. Nieuwoudt and C. Fisher, "Investigation of Real-Time Control of Finger Movements Utilizing Surface EMG Signals," in IEEE Sensors Journal, vol. 23, no. 18, pp. 21989-21997, 15 Sept.15, 2023, doi: 10.1109/JSEN.2023.3299384. https://ieeexplore.ieee.org/document/10201474
Published in RAPDASA-RobMech-PRASA-AMI, 2023
Numerous terrestrial robotic platforms use computational power for path planning. These platforms typically use a vision system to identify obstacles and perform path planning. In cases where the vision systems are unable to function due to larger obstacles in the area, the paths are chosen as random functions of the given terrain to explore the environment and often results in missteps and moving away from the target location. In this research, we present a multi-robot system comprised of a terrestrial robot with a tethered aerial drone. By making use of the additive overhead view, the target location can be identified, and the exploration and path planning algorithms biased, subsequently reducing the computational cost, and creating a more efficient path planning approach. Focus has been placed on the control architecture of the system.
Recommended citation: PENDING https://www.matec-conferences.org/articles/matecconf/abs/2023/15/matecconf_rapdasa2023_04003/matecconf_rapdasa2023_04003.html
Published:
Mark awarded: 77%
Published:
Mark awarded: 75%
Published:
Mark awarded: 75%
Published:
Mark awarded: 75%
Published:
Mark awarded: 78%
Published:
Mark awarded: 65%
Undergraduate course, University 1, Department, 2014
This is a description of a teaching experience. You can use markdown like any other post.
Workshop, University 1, Department, 2015
This is a description of a teaching experience. You can use markdown like any other post.